- 분류 전체보기 (54238)

- 유엔 (596)
- 수소핵폭탄(핵탄두) 실험과 KN-08 (2002)
- 뇌 분해감청팀으로 국제사건 자료 (34)
- 부호들의 이야기(평민적 자본가 삶) (14)
- Guide Ear&Bird's Eye (331)
- Guide Ear&Bird's Eye2 (905)
- Guide Ear&Bird's Eye3 (213)
- Guide Ear&Bird's Eye4 (28)
- Guide Ear&Bird's Eye5 (3)
- Guide Ear&Bird's Eye6 (924)
- Guide Ear&Bird's Eye7 (14)
- 국가정보원 안보모니터 (372)
- 경찰 머리소리함[Bird' Eye](i) (5)
- 감사원 (13)
- 핵.잠수함.미사일.전자 지능 뇌 자료 (455)
- Guide Ear&Bird's Eye8 (1396)
- Guide Ear&Bird's Eye9 (552)
- Guide Ear&Bird's Eye10 (648)
- Guide Ear&Bird's Eye11 (72)
- Guide Ear&Bird's Eye12 (292)
- 자유화 민주화운동 세력-탈북민 자료 (418)
- Guide Ear&Bird's Eye13 (613)
- Guide Ear&Bird's Eye14 (215)
- CIA.FBI(귀가 빙빙 도는 뇌 감청기) (574)
- Guide Ear&Bird's Eye15 (806)
- 아시아 (8)
- 同一介中華(中國) (2648)
- Guide Ear&Bird's Eye16 (377)
- Guide Ear&Bird's Eye17 (243)
- Guide Ear&Bird's Eye18 (2)
- 장족(좡족 ,광서) (0)
- Guide Ear&Bird's Eye19 (0)
- Guide Ear&Bird's Eye20 (0)
- 동북아[극동] (0)
- Guide Ear&Bird's Eye21 (1210)
- Guide Ear&Bird's Eye22 (4613)
- Guide Ear&Bird's Eye23 (50)
- Guide Ear&Bird's Eye24 (2347)
- Guide Ear&Bird's Eye25 (0)
- Guide Ear&Bird's Eye26 (17)
- Guide Ear&Bird's Eye27 (29)
- 미국 알래스카 주(극동) (2)
- 동남아시아 (38)
- Guide Ear&Bird's Eye28 (14)
- Guide Ear&Bird's Eye29 (113)
- Guide Ear&Bird's Eye30 (456)
- Guide Ear&Bird's Eye31 (43)
- Guide Ear&Bird's Eye32 (162)
- Guide Ear&Bird's Eye33 (7)
- Guide Ear&Bird's Eye34 (22)
- Guide Ear&Bird's Eye35 (2)
- Guide Ear&Bird's Eye36 (38)
- Guide Ear&Bird's Eye37 (85)
- Guide Ear&Bird's Eye38 (72)
- 벵골만 주변국 정상회의 (1)
- Guide Ear&Bird's Eye39 (145)
- Guide Ear&Bird's Eye40 (403)
- 중앙아시아 (43)
- Guide Ear&Bird's Eye41 (549)
- Guide Ear&Bird's Eye42 (94)
- Guide Ear&Bird's Eye43 (420)
- Guide Ear&Bird's Eye44 (381)
- Guide Ear&Bird's Eye45 (137)
- Guide Ear&Bird's Eye46 (823)
- Guide Ear&Bird's Eye47 (0)
- 유럽[Europe, 歐羅巴] (0)
- 유럽연합(EU) (136)
- 동유럽 지역 (38)
- 흑해 주변국 (569)
- 북유럽 지역 (47)
- 중부 유럽 지역 (145)
- Guide Ear&Bird's Eye48 (37)
- 서유럽 지역 (0)
- Guide Ear&Bird's Eye49 (347)
- Guide Ear&Bird's Eye50 (165)
- Guide Ear&Bird's Eye51 (8)
- 남유럽 지역 (46)
- Guide Ear&Bird's Eye52 (16)
- 아프리카 (0)
- Guide Ear&Bird's Eye53 (23)
- 북아프리카 지역 (458)
- Guide Ear&Bird's Eye54 (34)
- 중앙아프리카(중부아프리카) 지역 (9)
- Guide Ear&Bird's Eye55 (26)
- 남부 중앙아프리카 지역 (21)
- 남아프리카 지역 (40)
- 아메리카 (1)
- 북아메리카 지역 (0)
- Guide Ear&Bird's Eye56 (1609)
- Guide Ear&Bird's Eye57 (37)
- Guide Ear&Bird's Eye58 (18)
- 중앙 아메리카 지역 (99)
- 남아메리카 지역 (134)
- 오세아니아 지역 (75)
- 5대양 (0)
- 대한민국 전직대통령 자료 (226)
- 2단계 민주화-민주(문민)정부 수립 (127)
- -국가주석이나 대통령 임기제한 (152)
- -平和大忍, 信望愛. (730)
- ->제1, 2, 3공화국 구분(북한역사) (74)
- '三國志[사람됨 교육장소-仁德政治]" (136)
- [NATO 모델] (151)
- Guide Ear&Bird's Eye59 (4274)
- -미국 언론- (8035)
- 한중 육로개척자 -延邊 藥山 진달래 (53)
- 한일해저터널 개척자-東京 櫻花 (15)
- 세계각국 자유사회 인물 발굴-許灌 (7)
- 대북정책 (99)
Asia-Pacific Region Intelligence Center
“자율주행자동차”… 센서 공격에 관한 사이버 보안 본문
“자율주행자동차”… 센서 공격에 관한 사이버 보안
CIA Bear 허관(許灌) 2023. 6. 18. 21:09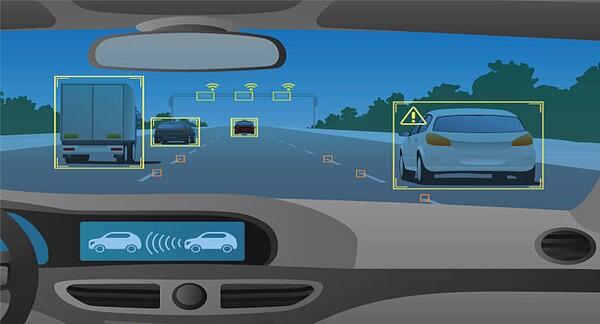
자율주행 기술의 발전과 함께 운전자의 편의성 및 안전을 위해 Radar, LiDAR, Vision(Camera) 등의 다양 한 센서가 자동차에 탑재되고 있고, 이를 이용하는 첨단운전자보조시스템(Advanced Driver Assist System: ADAS)이 제공되고 있다. 자동차의 자율주행 기능은 인지, 판단, 제어의 3단계로 이루어지고, 자율주행자동 차의 센서는 자동차 주행 환경에 대한 인지를 담당하고 있다.
하지만, 최근 자동차에 탑재된 센서에 대한 보안성 분석을 위해 자동차 센서에 대한 취약점 분석 연구가 활발하게 이루어지고 있고, 이를 통해 신호 Jamming, Spoofing 그리고 Physical Adversarial Attack(물질적 적대적 공격) 등의 다양한 공격 방법론이 소개되고 있다.
자율주행의 기반이 되며, 감지 센서와 GPS, 통신, 지능형 장비 등을 이용하여 주행 중 자동차가 스스로 주변 환경을 인식하고 판단을 내리게 해주는 시스템을 지능형 운전자보조 시스템(Advanced Driver Assistance System: ADAS)이라고 한다. 자율주행 기술 수준은 ADAS의 센서 결합 정도에 따라 분류되며, ADAS는 인지, 판단, 제어 총 세 단계로 구성된다.
첫째 인지 단계는 센서로부터 데이터를 수집하는 단계로, Radar, LiDAR, Camera 등과 같은 인지 센서들로부터 외부 환경의 정보를 수집하여 가공한다.
둘째 판단 단계는 인지 시스템에서 수집된 정보들을 통해 상황에 대한 적절한 경로 및 움직임을 결정하는 단계로, 자동차의 사각지대 및 환경적 영향에 따라 발생할 수 있는 인지 오류를 보완하기 위해 실시간 도로 환경 정보를 제공하는 정밀 지도와 다른 자동차의 정보를 알 수 있는 Vehicle to Everything(V2X) 통신 정보를 융합하여 정확한 주행 정보를 계산한다.
셋째 제어 단계는: 판단 단계에서 내려진 결정을 실제로 구현하는 단계로, 액추에이터 등을 통해 속도를 조절하거나 방향 제어 및 제동 등으로 직접적인 움직임을 관할한다.
Radar 센서 공격
레이더 센서는 자동차에 자동 긴급 브레이크 제동 기능과 차선 유지 기능을 지원하기 위해 사용되며, 전자파를 방출하고 수신하는 기본 원리로 작동하여 time-of-flight 시간을 측정하여 장애물과의 거리를 측정한다.
레이더 센서에 대한 공격을 수행하기 위해 해당 연구팀은 Tesla 자동차에 장착된 레이더 센서의 신호 특성을 먼저 분석하고, 이를 기반으로 레이더 센서에 대한 재밍(Jamming: 전파방해) 공격 및 스푸핑(Spoofing: 속임수) 공격을 수행하였다.
LiDAR 기반 인식에 대한 적대적 센서 공격
LiDAR 센서는 레이저를 이용한 스푸핑 공격에 취약한 것으로 보고되고 있다. 특히, 자율 주행자동차의 LiDAR 센서에 레이저 신호를 재생하여 스푸핑 공격을 수행할 경우, 자율주행 자동차의 LiDAR에 사물 인식 위치를 더 멀리 혹은 더 가깝게 판단하도록 유도 할 수 있다.
Vision(Camera) 센서 공격
ADAS의 팬텀은 테슬라 자동차에 탑재된 카메라 센서에 의해 탐지된 물체가 실제 이미지인지 빛으로 투영 된 가짜 이미지(Phantom) 인지 분류하지 못하는 문제를 공개하였다.
안전성 문제 발견(Too Good to Be Safe)은 첫 번째 단계에서는 사람은 인식하지 못하지만 차선 감지 모듈에 의해 감지되는 최적의 오류주입(Perturbation)을 찾는다. 이를 위해 테슬라의 자율주행시스템을 담당하는 오토파일 럿(Autopilot) 펌웨어를 리버스 엔지니어링하여 차선 감지 모듈의 과정을 분석하였다.
두 번째 단계에서는 최적의 Perturbation을 스티커 형태로 도로에 표시 한 후, 테슬라의 오토파일럿 기능에 대한 공격 테스트를 진행하였다. 해당 공격 테스트를 위해 물리적 세계 (실제 도로 환경)에서의 Perturbation 좌표와 자동차 카메라에 대한 상대적인 좌표를 맵핑 시켰고, 시뮬레이션 과정에서 생성된 공격용 카메라 이미지의 Perturbation의 위치를 실제 도로 환경의 위치로 맵핑할 수 있었다.
더티 로드 공격 가능(Dirty Road Can Attack)은 제안하는 공격 방법론은 ALC 시스템이 카메라 센서를 기반으로 작동하는 점을 이용하여 도로공사, 자연재해 등의 이슈로 인해 더러워진 도로의 패턴과 유사한 adversarial example 를 생성하는 최적화 문제를 정의하였다.
결론적으로 자율주행자동차의 센서 공격은 자율주행에 영향을 줄 수 있는 심각한 오류를 주입할 수 있으므로, 자동차 충돌사고 등의 물리적인 피해로 연결될 수 있다. 자율주행자동차 센서에 대한 공격들에 대응하기 위해서는 자율주행자동차의 인공지능 모델과 시스템 모델의 시맨틱 갭을 고려하는 고도화된 센서 보안 연구가 수행되어야 한다.
또한, 자율주행자동차의 인지 모듈에게 주행 상황을 오 인식하게 할 수 있는 공격 및 장애 사례들에 대한 데이터베이스 구축을 통해 자율주행자동차에 대한 보안성 및 안전성에 대한 평가를 진행할 수 있는 평가체계 구축이 필요하다.
“자율주행자동차”… 센서 공격에 관한 사이버 보안 < AI < 4차산업 시대 < 기사본문 - 디지털비즈온 (digitalbizon.com)
“자율주행자동차”… 센서 공격에 관한 사이버 보안 - 디지털비즈온
[디지털비즈온 김맹근 기자] 자율주행 기술의 발전과 함께 운전자의 편의성 및 안전을 위해 Radar, LiDAR, Vision(Camera) 등의 다양 한 센서가 자동차에 탑재되고 있고, 이를 이용하는 첨단운전자보조
www.digitalbizon.com
'Guide Ear&Bird's Eye6 > 수소차. 전기자동차와 친환경, 자율주행.무신통신기술' 카테고리의 다른 글
| 호주 알라우더 항공, 세계에서 가장 빠른 수소 연료 eVTOL 항공기 공개 (0) | 2023.07.03 |
|---|---|
| 도요타 출자한 '하늘을 나는 택시' 시험비행 가능하게 돼 (0) | 2023.07.02 |
| 도요타 EV 전지 등에 약 1100억 엔 보조금 지원 결정 (0) | 2023.06.18 |
| 삼성전자·포스코 등 7개 기업 통근버스, 수소차로 바꾼다 (0) | 2023.05.07 |
| BMW 1-2월 전기차 판매 전년比 2배 증가, 中 시장 '큰 힘' (0) | 2023.04.17 |



